- Détails
-
Catégorie : Kit robot arduino
-
Publication : mercredi 11 novembre 2020 14:21
-
Écrit par Bensky
-
Affichages : 3488
Voiture Bluetooth version complète.

Voici la version bluetooth version complète, c'est à dire qu'il fait toutes les fonctions à l'aide du téléphone.
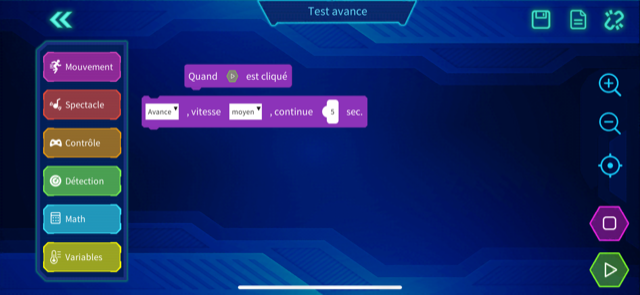
J'ai crée un programme ou on ajoute toutes les fonctions dans un même programme.
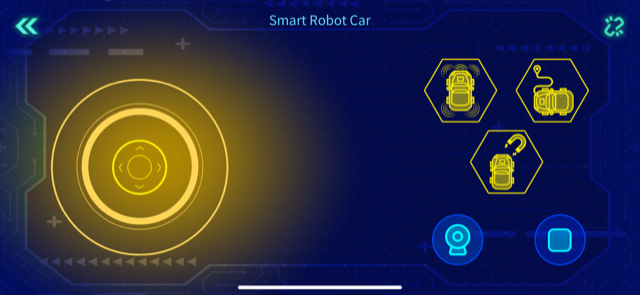
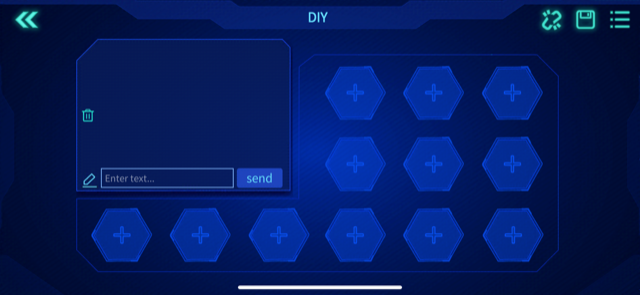
Interface personnalisée pour robot Arduino.
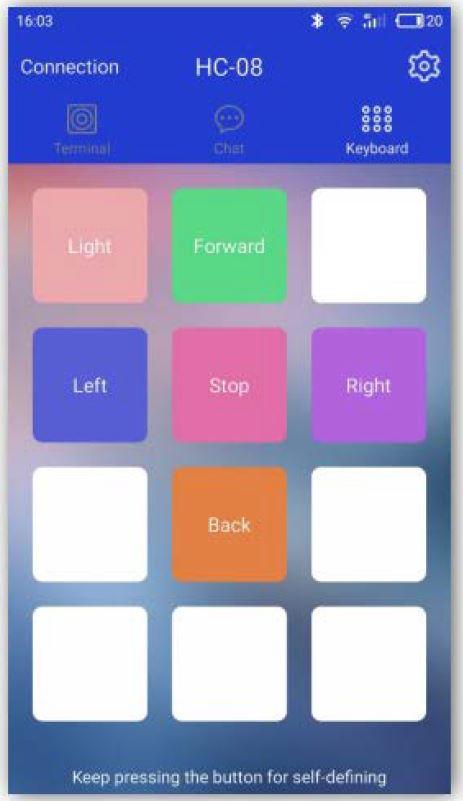
Voici l'interface de mon téléphone pour le déplacement du véhicule Arduino.
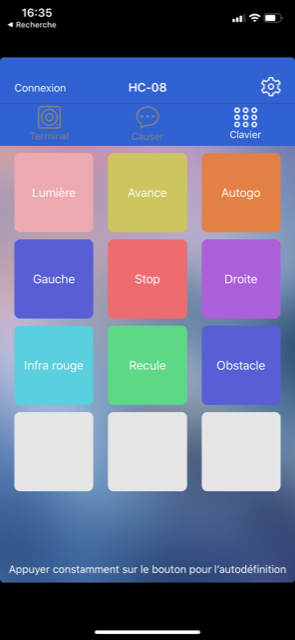
Il suffit d'appuyer sur le bouton du téléphone pour déclencher la fonction du robot arduino.
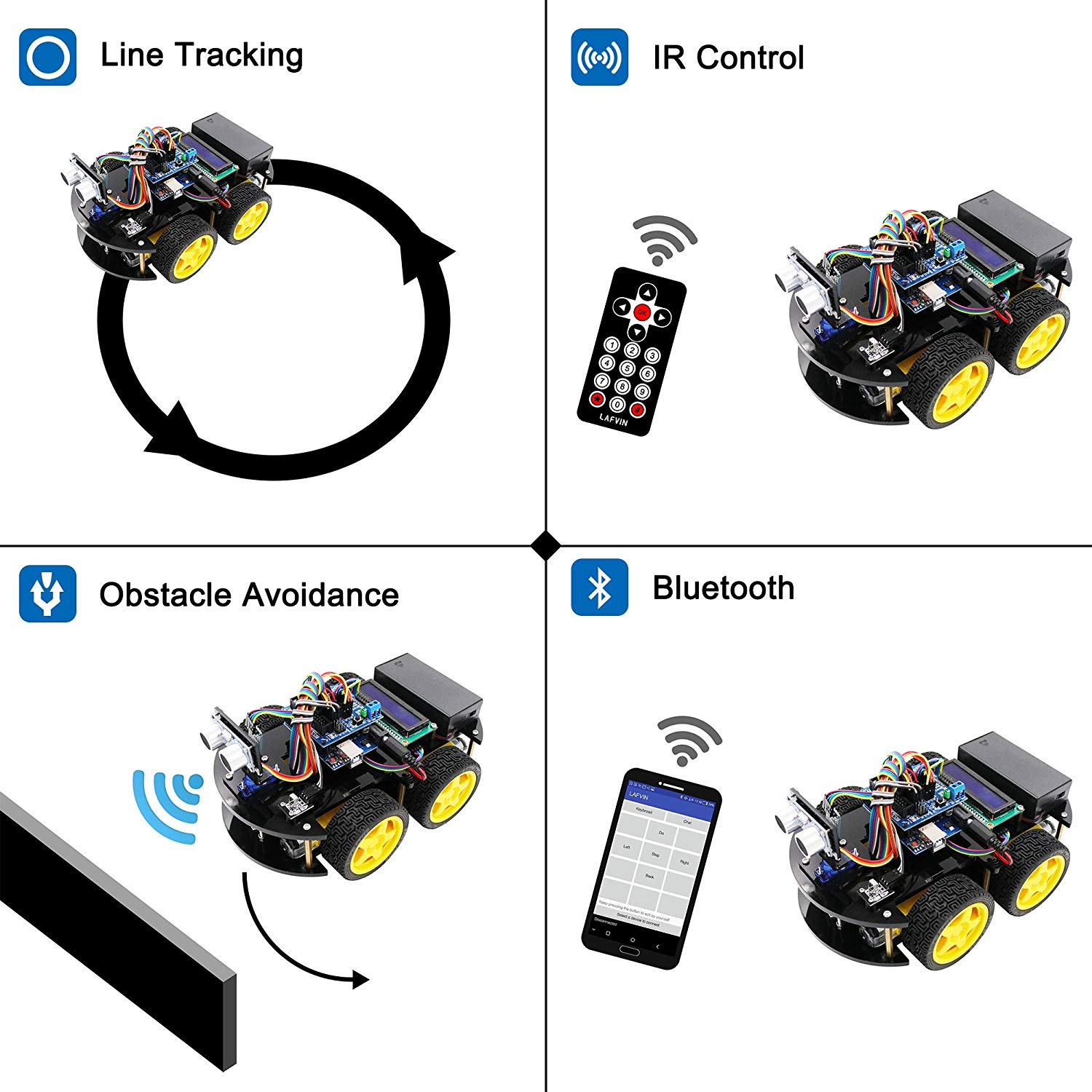
Il y a une fonction lumière, une fonction avancer, reculer et stopper, tourner gauche, tourner droite, AUTO GO et évitement obstacle.
Pour réussir à tout intégrer, il faut créer plusieurs groupe de fonctions
Groupe de fonctions
- Le groupe de fonction 'Faire bouger le véhicule" qui est composé de lumière, Avancer, reculer, gauche, droite, stop.
- La fonction "infrarouge" qui permet d'utiliser la télécommande à infra-rouge.
- La fonction obstacle qui permet d'éviter les obstacle quand le robot l'aperçoit.
Voici le programme pour faire fonctionner tout le véhicule.
Programme de toutes les fonctions robot arduino.


Programme voiture robot Arduino Bluetooth complet (version pdf)
Il faut bien installer toutes les bibliothèques et vous assurez que chaque sous-fonction marche correctement pour que l'ensemble du programme fonctionne.
Vous avez terminé, vous pouvez jouer avec le robot Arduino et avoir toutes les commandes sur le téléphone.
Bon programme et amusez vous bien.
- Détails
-
Catégorie : Kit robot arduino
-
Publication : samedi 31 octobre 2020 12:02
-
Écrit par Bensky
-
Affichages : 3378
Faire bouger la voiture :
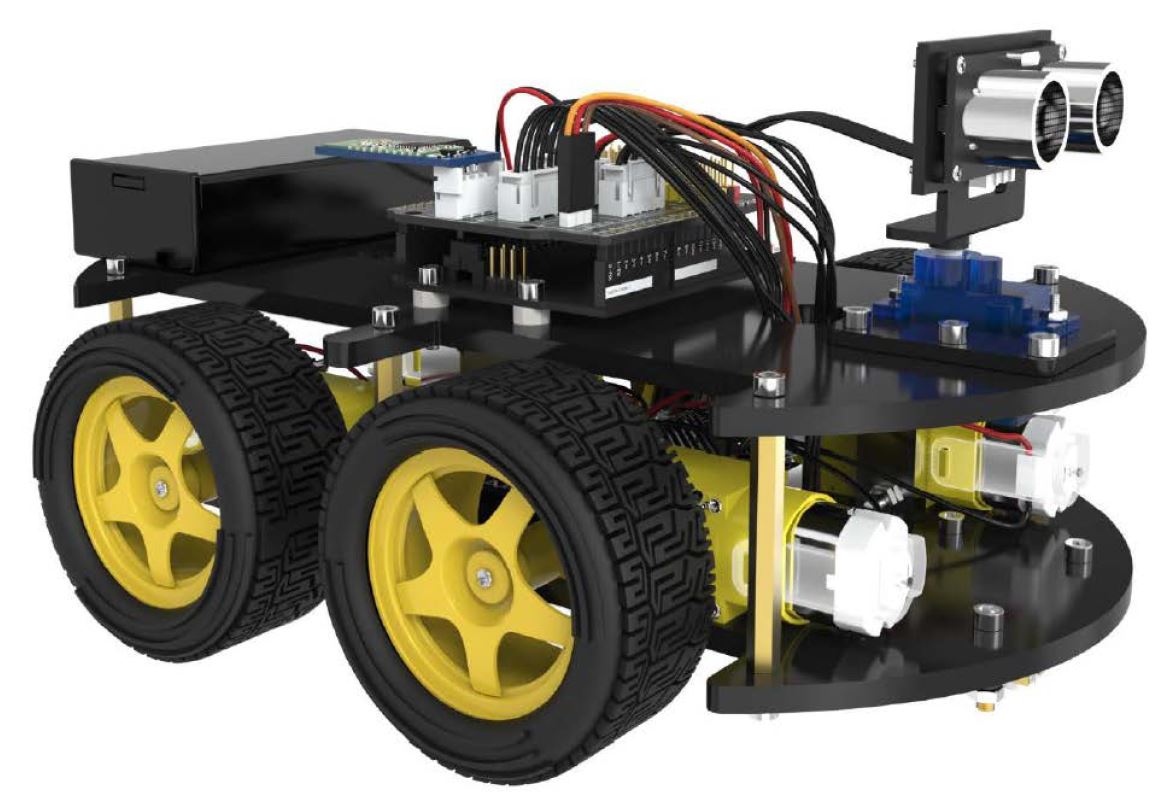
Voici une explication pour faire bouger la voiture robot Arduino.
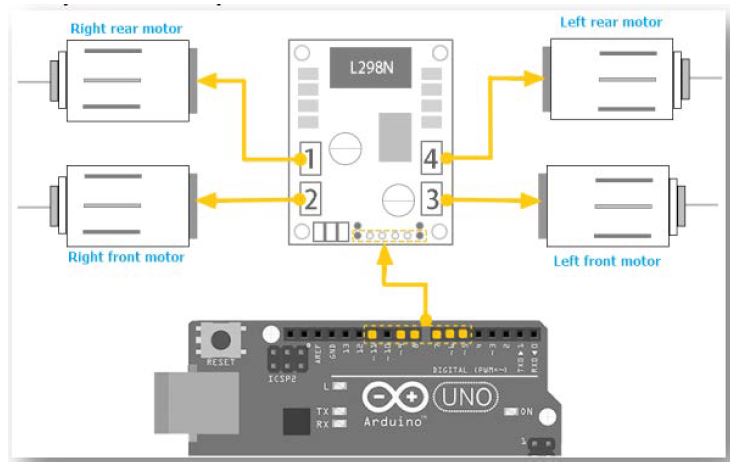
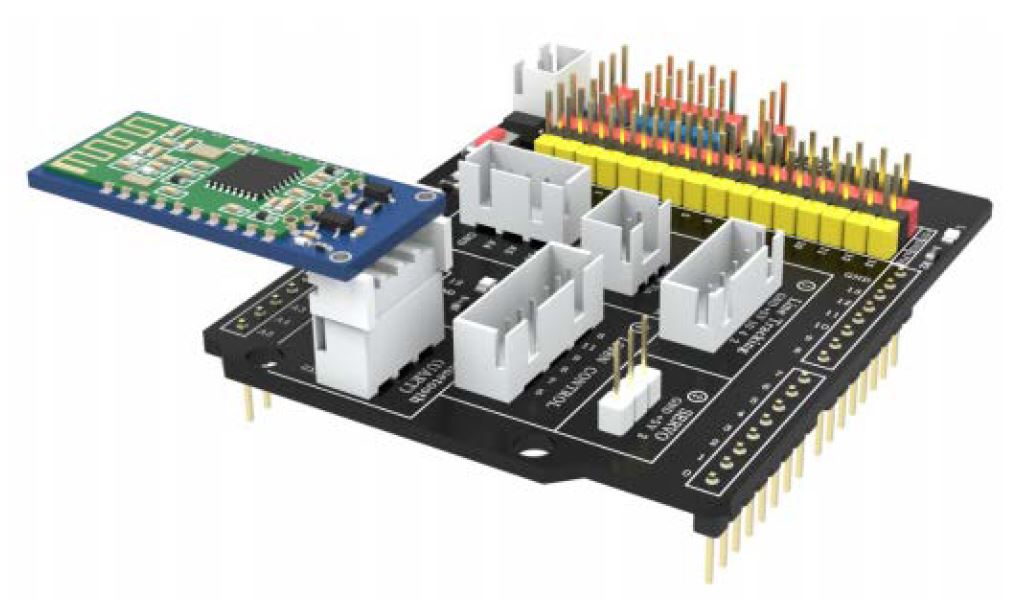
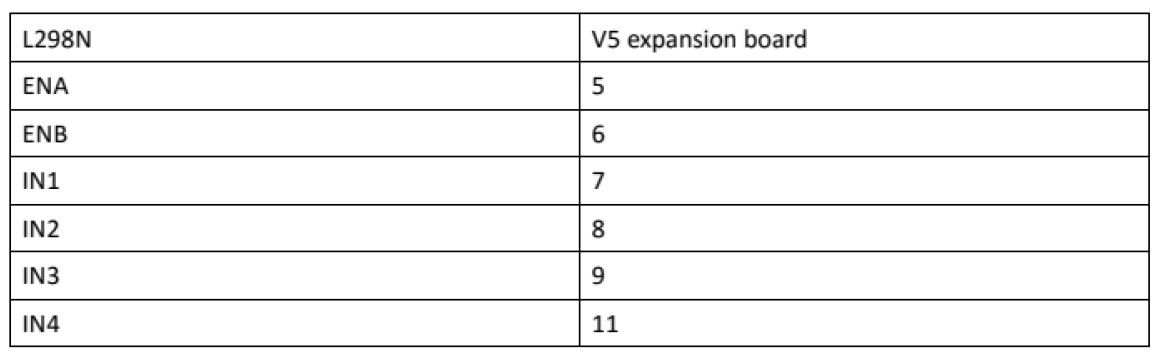
La définition des ports de connexion sur la carte L298N sont indiquée ci dessus. Les moteurs doivent être connectés à la carte L298N.
L298 GND est connecté à la batterie GND
L298N VCC est connecté au boitier de batterie VCC
La carte UNO est également connectée au boitier de la batterie
L298N 5V ici ne peut pas être connecté à UNO 5V.
ENA et ENB contrôlent la vitesse du moteur droit et la vitesse du moteur gauche séparément par PWM.
IN1, IN2, IN3, IN4 : IN1 et IN2 sont utilisé pour contrôler le moteur gauche, IN3 et IN4 sont utilisés pour contrôler le moteur droit.
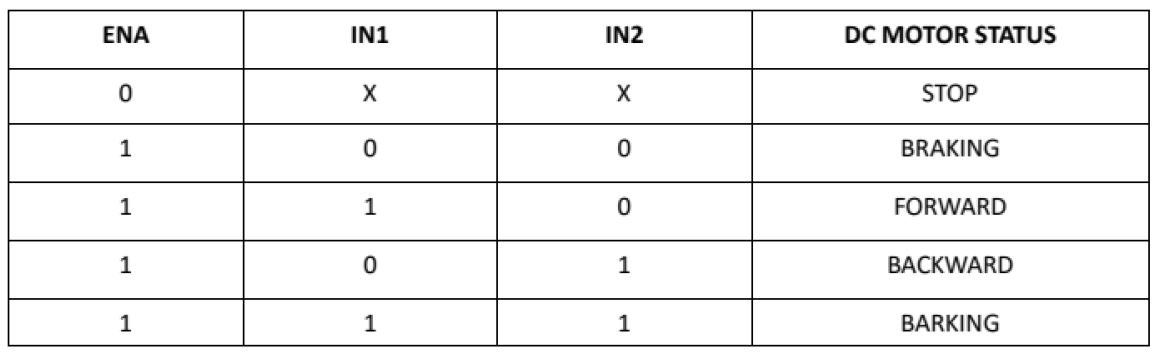
On utilise les commande en configurant les différentes entrées.
Exemple : Pour STOP, on met ENA à 0 et le véhicule freine.
pour avancer, on met ENA à 1, IN1 à 1 et IN2 à 0.
Faire bouger le véhicule
nous allons déplacer le véhicule sans contrôler la vitesse.
Pour cet exemple, nous utiliserons Arduino 5,6,7,8,9 11 broches pour contrôler la voiture. 9 et 11 broches contrôle la roue droite, 7 et 8 broches contrôlent la roue gauche. 5 et 6 broches contrôlent ENA et ENB.
La connexion est donc :
Ensuite il faut réaliser un soft arduino pour lancer le programme.
Voici les différents logiciels arduino. Ces softs sont utilisé pour configurer les mouvement et en faire une application simple.
Je vous conseille d'acheter le kit complet, ca vous permettra de bien comprendre le produit.
Programme Avancer et reculer (Forward et back).
Le programme permet de faire avancer, de stopper, de reculer et de stopper. C'est un programme ELEGOO extrait des documents du kit Robot Arduino.
Vous définissez les bibliothèques, ensuite vous définissez les paramètres, vous configurez le set up et après vous exécutez le programme principal (LOOP).
Programme Rotation roue gauche
Ce programme permet de faire une rotation de la roue gauche de 500ms, de stopper, de revenir en arrière de 500ms et de stopper. C'est un programme ELEGOO extrait des documents du kit Robot Arduino.
Vous définissez les bibliothèques, ensuite vous définissez les paramètres, vous configurez le set up et après vous exécutez le programme principal (LOOP).
Programme Rotation roue droite
Ce programme permet de faire une rotation de la roue droite de 500ms, de stopper, de revenir en arrière de 500ms et de stopper. C'est un programme ELEGOO extrait des documents du kit Robot Arduino.
Vous définissez les bibliothèques, ensuite vous définissez les paramètres, vous configurez le set up et après vous exécutez le programme principal (LOOP).
Programme Déclencher une vitesse
Ce programme permet de déclencher une vitesse. C'est un programme ELEGOO extrait des documents du kit Robot Arduino.
Vous définissez les bibliothèques, ensuite vous définissez les paramètres, vous configurez le set up et après vous exécutez le programme principal (LOOP).
Programme AUTO GO (Automatisation)
Cette fonction est une fonction de de déplacement automatisée. Le produit se déplace en avançant pendant 1s, recule pendant 1s, tourne à droite pendant 1s, tourne à gauche pendant 1s.
Vous définissez les bibliothèques, ensuite vous définissez les paramètres, vous créez des fonctions avance, recule, gauche et droite, ensuite, vous configurez le set up et après vous exécutez le programme principal (LOOP).
Programme AUTO GO2 (Automatisation)
Cette fonction est une fonction de de déplacement automatisée. Le produit se déplace en avançant pendant 2s, recule pendant 2s, tourne à droite pendant 500ms, tourne à gauche pendant 500ms. c'est un soft que j'ai modifié pour permettre de tourner à droite et à gauche plus rapidement.
Vous définissez les bibliothèques, ensuite vous définissez les paramètres, vous créez des fonctions avance, recule, gauche et droite, ensuite, vous configurez le set up et après vous exécutez le programme principal (LOOP).
Programme AUTO GO3 (Automatisation d'un endroit A à un endroit B)
Cette fonction est une fonction de de déplacement automatisée. Le produit réalise un séquence de fonction avancer, reculer, arrêter, tourner droite et tourner gauche. cette séquence permet d'aller d'un point A à un point B, en évitant les obstacles.
Vous définissez les bibliothèques, ensuite vous définissez les paramètres, vous créez des fonctions avance, recule, gauche et droite, ensuite, vous configurez le set up et après vous exécutez le programme principal (LOOP).
Vous pouvez vous amusez à modifier le programme principal pour faire des fonctions AUTO GO customisé.
Tous ces programmes sont des simples programmes qui ne sont pas intelligent mais qui permettent simplement de faire bouger le véhicule. (Avancer, reculer, tourner droite, tourner gauche et automatisation des mouvements).